
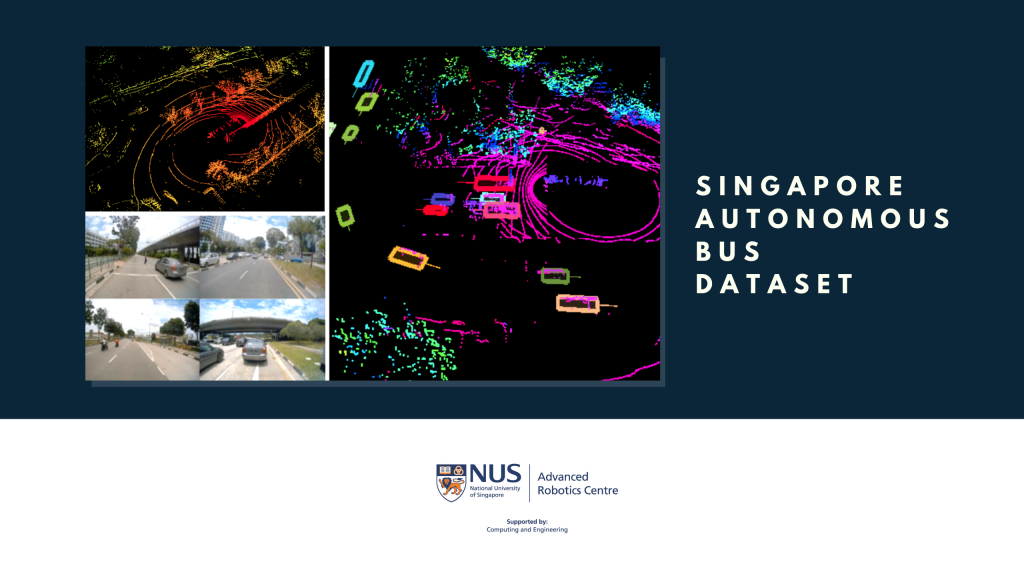
The SGAB dataset focuses on perception tasks: Detection, Tracking and Prediction; and was developed to accomplish these tasks. With images and lidar point clouds covering the urban environment mounted on a bus traversing Singapore Roads. The choice of a bus as the ego vehicle presents new challenges such as a larger blindspot area, sparse lidar point clouds amongst others.
During this drive, the sensor data was collected using the Robot Operating System (ROS) and saved as a rosbag file. Subsequently, the following data were extracted from the rosbag at 20 Hz:
+ radar points,
+ camera images and
+ lidar point clouds.
The data was then organised into 37 sets, each containing a continuous-time sequence of 200s. The data was further downsampled to 2Hz for manual ground truth labelling of the car, truck, pedestrian, bicycle, motorbike, PMD, and bus classes. Each object was labelled with a consistent and unique identity within a set, such that the trajectories of the objects can be extracted.
Each set is contained in a folder containing the following type of files:
+ folder of camera images at 20Hz
+ folder of .pcd point cloud files at 20Hz
+ JSON file with radar data at 20Hz
+ JSON file with labelled objects in Top-Down view in Universal Transverse Mercator (UTM) 48N frame at 2 Hz
+ JSON file with labelled objects in Top-Down view in ego frame at 2Hz
+ CSV file of occluded objects, which are present in the frame but not (these objects can be tracked but not detected)
Each type of file are sorted into their respective folders, with files from the same set sharing the same name.
When using this dataset in your research, do use the following to cite us:
@inproceedings{SGAB2020, author = {Chong,Yue Linn and Lee, Christina Dao Wen and Chen, Liu Shifeng and Shen, Chongjiang and Ang, Marcelo H. and Chan, Ken Kok Hoe}, title = {Singapore Autonomous Bus (SGAB) Dataset}, url = {https://arc.nus.edu.sg/project/2020/10/abcd/}, year = {2020} }
This research is supported by the National Research Foundation, Prime Ministers Office, Singapore under its LTA Urban Mobility Grand Challenge Program, Project Code UM01/002, ST Kinetics Autonomous Bus Trial.
Please fill in your email to get the download link.