Skip to content
Home
People
Management board
Management
Principal Investigators
Research
NUS Seed Grant Program
Sensor-Fused Embodied-AI Single Motor Hip Exoskeleton
Biohybrid Robot for Aquatic Environmental Monitoring
News
Events
Contact
Home
People
Management board
Management
Principal Investigators
Research
NUS Seed Grant Program
Sensor-Fused Embodied-AI Single Motor Hip Exoskeleton
Biohybrid Robot for Aquatic Environmental Monitoring
News
Events
Contact
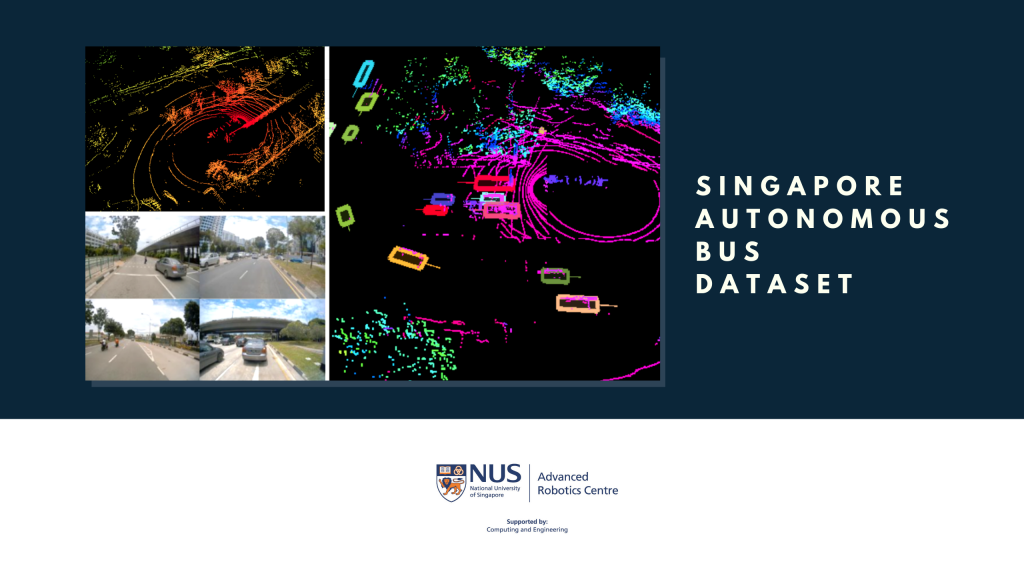
Singapore Autonomous Bus (SGAB) Dataset
Marine Robotics
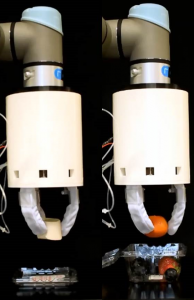
Soft Robotics
Autonomous Vehicles
Autonomous Mobile Robot
Mobile Manipulator