Soft End-Effectors
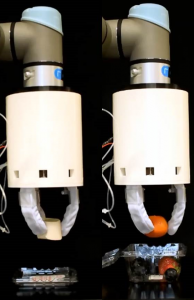
A sensorized robotic manipulator system is developed for
(i) agriculture such as fruit and vegetable picking and sorting,
(ii) food packaging such as but not limited to cakes, fruits, pies, etc.,
(iii) advanced manufacturing such as handling glassware, electronic components, etc., and
(iv) service robots.
It provides safe, compliant and efficient grasping which leads to improvements in grasping performance of tasks deemed previously to be too delicate for traditional robotic end-effector.
Soft Actuators

The figure on the left shows some examples of soft actuators. The top one is made from silicone elastomer; the middle one is made from nylon fabrics; the bottom one is made from 3D printing. These actuators are driven by pneumatic power. When certain pneumatic pressures are applied to the prototypes, they can have different actuation profiles. The top actuator has a helix shape and the other two actuators bend in a plane.